Hallo zusammen,
neulich tauchte hier im Forum die Frage auf, warum OMSI eigentlich keine lineare Lenkcharakteristik unterstützt. Die Frage ist mehr als berechtigt – gehen wir ihr auf den Grund! Spoiler: Die Lösung steht weiter unten 
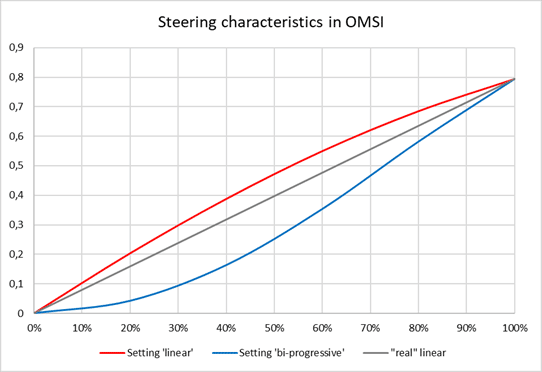
Das Problem: Auch wenn man der Lenkung in OMSI eine lineare Kennlinie zuweist, so ist die Charakteristik trotzdem degressiv, also um die Mittellage herum sehr direkt und in Richtung der Lenkanschläge dann immer unempfindlicher – also genau andersherum, als man es braucht, gerade bei Bussen mit realistischen Wendekreisen. Die alternative Option „bi-progressiv“ ist dagegen überhaupt nicht zu gebrauchen, da die Lenkung um die Mittellage herum so unempfindlich ist, dass man schon für einen simplen Spurwechsel ordentlich kurbeln muss.
Die Ursache: Der Wert für die Lenkung in OMSI läuft intern zwar linear von 0-100% inv_min_turnradius, der Einschlagwinkel der Räder ergibt sich dann aber über den (Arcus-)Tangens, und der ist natürlich nicht linear bzw. proportional zum inv_min_turnradius, sondern hat die beschriebene degressive Kennlinie.
Die Lösung: Die ist so simpel wie funktionell: Ein „virtueller Gamecontroller“ übernimmt die Rolle des „Übersetzers“ und spielt OMSI eine angepasste, progressive Kennlinie vor, die mit der OMSI-internen degressiven Kennlinie verrechnet wird und heraus kommt – tadaaa – eine wunderbar realistische lineare Charakteristik für feinfühlige Steuerung in allen Lebenslagen!
Wie geht das Schritt für Schritt?
Schritt 1: Zunächst brauchen wir einen Emulator, der die Befehle unseres Gamecontrollers auf einen virtuellen Controller mappt und dabei unsere gewünschte Kennlinie abbilden kann. Ich empfehle hierfür den Xbox 360 Controller Emulator (Freeware), Download z.B. unter Jocys.com - Homepage. Falls diese Seite irgendwann einmal offline sein sollte, sucht einfach nach „xbox-360-controller-emulator-4-17-15-0.exe“ oder „X360CE.exe“.
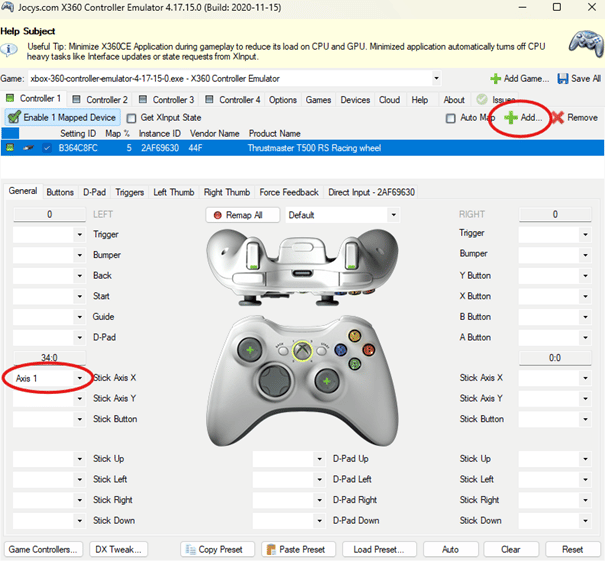
Schritt 2: Der Emulator kann direkt nach dem Download als Anwendung gestartet werden und benötigt keine weitere Installation. Mit „Add“ wird das vorhandene Lenkrad ausgewählt, anschließend wird die Lenkachse unseres Controllers, üblicherweise Axis 1, der „Stick Axis x“ zugewiesen. Damit ist in der Systemsteuerung jetzt ein virtueller Gamecontroller namens „Controller (XBOX 360 For Windows)“ eingerichtet.
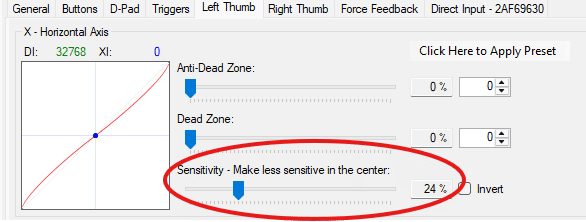
Schritt 3: Im Reiter „Left Thumb“ passen wir nun die Kennlinie nach unseren Wünschen an und stellen die Empfindlichkeit auf den experimentell ermittelten Wert von 24% ein (Trust me, Bro 😊). Damit erzeugen wir die gewünschte progressive Kennlinie, zu erkennen an der leicht bauchigen Form der roten Linie.
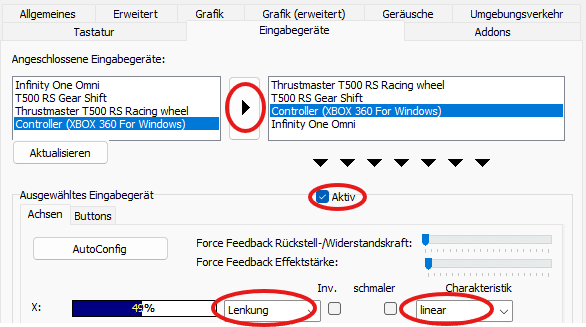
Schritt 4: Jetzt müssen wir den virtuellen Controller in OMSI einrichten. Hierfür wird der virtuelle Controller in den OMSI-Optionen in gewohnter Form über den Pfeilbutton vom linken ins rechte Auswahlfenster gebracht, aktiviert und auf der X-Achse mit einer linearen Lenkkennlinie versehen. Force Feedback bleibt unverändert, das kann der virtuelle Controller nicht in der gewünschten Form abbilden.
Schritt 5: Damit das Force Feedback weiterhin funktioniert, muss das vorhandene Lenkrad zwingend weiter aktiv bleiben, auch die Achsenzuordnung der Lenkung muss erhalten bleiben!
Damit sind im OMSI nun zwei Controller auf die Lenkachse gemappt. Klingt komisch, ist aber so
Schritt 6: Damit der virtuelle Controller die Inputs des echten Lenkrads auch wirklich überschreibt, muss der virtuelle Controller in der Auswahlliste unterhalb des Lenkradeintrags stehen! Wenn man das Lenkrad bereits eingerichtet hat, ist das auch der Fall, da der virtuelle Controller einfach ans Ende der Liste (gamectrler.cfg) angefügt wird.
Wenn die Reihenfolge der Controller in der Liste nicht stimmt, muss die Datei gamectrler.cfg (zu finden im OMSI-Ordner „\Inputs“ – vorher unbedingt Backup erstellen!) händisch bearbeitet werden, indem der Eintrag
[ctrl]
Controller (XBOX 360 For Windows)
…
bis zur Zeile vor dem nächsten nächsten [ctrl]-Eintrag markiert, ausgeschnitten und ganz ans Ende der Datei eingefügt wird.
Fertig!
Jetzt kann die erste Probefahrt beginnen und das vollkommen neue Fahrerlebnis genossen werden!
Zum Testen empfiehlt sich eine Kontrolle der Lenkradbewegung über den gesamten Lenkbereich. Mit den Thüringer-Wald-Bussen ist dies ganz einfach machbar: Im Ordner \Vehicles\TH_Ueberlandbus\Script wird in der Constfile „_Custom_Settings“ der Lenkwinkel „custom_steering_angle“ auf den halben maximalen Drehwinkel des vorhandenen Lenkrads gesetzt. Bei einem 900°-Lenkrad also auf den Wert 450. Damit muss das 3D-Lenkrad im OMSI-Cockpit exakt synchron zum Drehwinkel des Gamecontrollers laufen. Wenn nicht, ist irgendwo im Prozess etwas schiefgelaufen.
Wenn der virtuelle Controller korrekt funktioniert, merkt ihr das aber bereits am deutlich verbesserten Lenkverhalten im Geradeauslauf.
Achtung: Unter Umständen kann es am Anfang sein, dass die Lenkradanimation noch etwas hakelig ist und beim Lenken Vibrationen im Force Feedback entstehen. Dieser Effekt verschwindet jedoch, wenn man im Stand einmal vollständig das Lenkrad nach links und rechts dreht, und die Steuerung ist danach so geschmeidig wie sie sein soll.
Wer möchte, kann natürlich mit der Kennlinie für den virtuellen Controller noch weiter herumexperimentieren. Mit 24% Sensitivity kommt man wie gesagt auf eine exakt lineare Kennlinie, größere Werte machen die Mittellage noch etwas unempfindlicher (progressive Kurve).
Zugegeben, das Ganze funktioniert natürlich nicht für Tastatur und Maus, aber dort fällt die degressive Kennlinie nicht ganz so negativ auf wie beim Lenkrad.
Probiert es gerne aus uns lasst mich wissen, wie ihr die Verbesserung einschätzt. Ich bin garantiert nicht der erste, der diese Idee hatte, aber aufgrund der – wie ich finde – enormen Wirkung dieses Tricks wollte ich das einfach mal für alle hier aufschreiben.
Und nun viel Spaß! 



